Все категории
-
Интегральные схемы (ICs)
Интегральные схемы (ICs)
- Интерфейс - Сенсор, емкостное касание(642)
- Специализированных ICs(12302)
- PMIC - регуляторы напряжения - специальное назначение(5644)
- PMIC - регуляторы напряжения - линейные контроллеры регулятора(793)
- PMIC - регуляторы напряжения - линейный + переключение(1829)
- PMIC - регуляторы напряжения - линейные(70981)
- PMIC - регуляторы напряжения - регуляторы DC DC DC(39569)
- PMIC - регуляторы напряжения - контроллеры переключения DC DC DC(13507)
- PMIC - опорного напряжения(9453)
- PMIC - V/F и F/V преобразователи(145)
- PMIC - Управление тепловыми режимами(592)
- PMIC - супервайзеров(47946)
- PMIC - RMS для преобразователей DC(170)
- PMIC - регуляторы мощности питания, мониторы(2104)
- PMIC - контроллеры PMIC - Power Over Ethernet (POE)(1008)
- PMIC - Управление питанием - специализированные(7722)
- PMIC - переключатели распределения питания, драйверы нагрузки(7706)
- PMIC - PFC (коррекция коэффициента мощности)(1222)
- PMIC - или контроллеров, идеально диоды(705)
- PMIC - мотор драйверы, контроллеры(4712)
- PMIC - освещение, балласт контроллеры(560)
- PMIC - ВОДИТЬ драйверы(7282)
- PMIC - лазерная драйверов(573)
- PMIC - контроллеров горячей замены(2816)
- PMIC - ворота драйверы(7083)
- PMIC - полный, половина моста драйверы(1342)
- PMIC - измерения энергии(654)
- PMIC - драйверы дисплея(1435)
- PMIC - текущее положение/управление(1481)
- PMIC - управления зарядом батареи(5553)
- PMIC - Зарядные устройства для аккумуляторов(3831)
- PMIC - AC DC преобразователей, автономный Хабы(4905)
- Память - контроллеры(358)
- Память - Proms конфигурации для ПЛИС(639)
- Память - Аккумуляторы(13)
- Память(65694)
- Логика - универсальная шина функции(706)
- Логика - переводчиков, уровня манетки(2854)
- Логика - специальности логика(1870)
- Логика - сигнальные переключатели, мультиплексоры, декодеры(9420)
- Логика - регистры сдвига(2665)
- Логика - паритет генераторов и шашки(335)
- Логика - Multivibrators(831)
- Логика - защелки(3658)
- Логика - ворота и инверторы - многофункциональный, настраиваемый(1687)
- Логика - ворота и инверторы(16453)
- Логика - флип-флоп(7780)
- Логика - память FIFO(4240)
- Логика - счетчики, разделители(3456)
- Логика - компараторы(592)
- Логика - буферы, драйверы, ресиверы, трансиверы(17835)
- Линейно - обработка видео(2909)
- Линейно - компараторы(5084)
- Линейно - Аналоговые умножители, разделители(263)
- Видео Усилители линейные - усилители - и модули(1905)
- Линейный - усилители - специального назначения(1856)
- Линейные - усилители - инструментация, операционные усилители, буферные усилители(34236)
- Линейные - усилители - аудио(4567)
- Интерфейс - запись голоса и воспроизведения(556)
- Интерфейс - UARTS (универсальный асинхронный передатчик приемника)(1237)
- Интерфейс - Телеком(4467)
- Интерфейс - специализированные(4833)
- Интерфейс - сигнал терминаторы(333)
- Интерфейс - сигнальные буферы, ретрансляторы, сплиттеры(1449)
- Интерфейс - сериализаторов, десериализаторы(1480)
- Интерфейс - датчик и детектор интерфейсов(1524)
- Интерфейс - модули(169)
- Интерфейс - модемы - ICs и модули(407)
- Интерфейс - Расширители ввода/вывода(1136)
- Интерфейс - фильтры - активный(1226)
- Интерфейс - кодеры, декодеры, конвертеры(714)
- Интерфейс - драйверы, приемники, передатчики(20755)
- Интерфейс - прямого цифрового синтеза (DDS)(117)
- Интерфейс - контроллеры(3628)
- Интерфейс - кодеки(1676)
- Интерфейс - аналоговые переключатели, мультиплексоры, демольтиплекторы(12567)
- Интерфейс - аналоговые переключатели - специальная цель(2533)
- Встроенный - система на чипе (SoC)(4496)
- Встроенный - PLDS (программируемое логическое устройство)(971)
- Встроенный - микропроцессоров(10083)
- Встроенный - микроконтроллеры - приложения(2275)
- Встроенный - микроконтроллеры(99285)
- Встроенный - микроконтроллер, микропроцессор, модули FPGA(1527)
- Встроенный - FPGAS (полевой программируемый массив затвора) с микроконтроллерами(81)
- Встроенный - FPGAS (полевой программируемый массив затвора)(27747)
- Встроенный - DSP (цифровые сигнальные процессоры)(4081)
- Встроенные - CPLDS (сложные программируемые логические устройства)(5187)
- Сбор данных - сенсорный экран контроллеры(1210)
- Получение данных - цифровые в аналоговые преобразователи (DAC)(14419)
- Сбор данных - Цифровые потенциометры(6250)
- Получение данных - аналог цифровых преобразователей (ADC)(17776)
- Сбор данных - аналогового переднего плана (AFE)(787)
- Получение данных - ADCS/DACS - Специальное назначение(3043)
- Часы/время - часы реального времени(2446)
- Часы/время - программируемые таймеры и осцилляторы(23469)
- Будильник/сроки - IC батареи(4)
- Будильник/сроки - линии задержки(1049)
- Часы/время - генераторы часов, PLLS, синтезаторы частоты(32775)
- Часы/время - часы буферов, драйверы(4568)
- Будильник/сроки - приложения(8652)
- Аудио специального назначения(1564)
Соответствующий производитель







-
Дискретных полупроводниковых изделий
Дискретных полупроводниковых изделий
- Регулирование тока - диоды, транзисторы(1090)
- Транзисторы - специального назначения(226)
- Транзисторы - Программируемые однопереходные(48)
- Транзисторы - JFETs(1558)
- Транзисторы - igbt - сингл(4799)
- Транзисторы - igbt - модули(63420)
- Массивы - IGBT - транзисторов(26)
- Транзисторы - FETS, MOSFET - Одиночный(48330)
- Транзисторы - FETS, MOSFET - RF(4903)
- Транзисторы - FETS, MOSFET - массивы(6641)
- Транзисторы - биполярные (BJT) - одинокий, предварительно сэтапный(4539)
- Транзисторы - биполярный (БЮТ) - сингл(25800)
- Транзисторы - биполярный (БЮТ) - RF(2087)
- Транзисторы - биполярные (BJT) - массивы, предварительно смещенные(2115)
- Транзисторы - биполярный (БЮТ) - массивы(2310)
- Тиристоры - Триаки(4044)
- Тиристоры - СНД - модули(3967)
- Тиристоры - ЦДЗС(5436)
- Тиристоры - динисторы, SIDACs(319)
- Силовые модули драйверов(1627)
- Диоды - Zener - сингл(87483)
- Диоды - стабилитрона - массивы(2619)
- Диоды - переменной емкости (варикапах, Varactors)(1200)
- Диоды - RF(2753)
- Диоды - выпрямители - сингл(67528)
- Диоды - выпрямители - массивы(20581)
- Диоды - мост Выпрямители(11700)
Соответствующий производитель




-
РЧ / ПЧ и RFID
РЧ / ПЧ и RFID
- Карты идентификации абонента (SIM -SIM)(77)
- РФ -циркуляторы и изоляторы(1742)
- RFID, РФ доступ, мониторинг ICs(1550)
- RFID-транспондеров, Теги(747)
- RFID считыватель модули(464)
- Наборы для оценки и разработки RFID, доски(30)
- RFID антенны(329)
- RFI и EMI - экранирование и впитывающие материалы(6444)
- RFI и EMI - контакты, Fingerstock и прокладки(7497)
- ВЧ приемник(668)
- РЧ -трансивер модули и модемы(6900)
- Приемопередатчик ВЧ ICs(4169)
- Радиочастотные ключи(9276)
- RF Шилдс(16401)
- Приемники ВЧ(1998)
- РФ -приемник, передатчик и приемопередат(2763)
- RF Мощность разделители/сплиттеры(1223)
- RF Мощность контроллер ICs(86)
- RF модуляторы(710)
- RF Смесители(2800)
- МПС РФ Misc и модули(3276)
- RF передний конец (LNA + ПА)(419)
- РЧ -оценка и наборы для развития, доски(747)
- Направленная РФ муфта(2718)
- RF Diplexers(1464)
- РФ детекторы(412)
- RF демодуляторы(249)
- РФ антенны(12319)
- ВЧ усилители(19651)
- Балун(1496)
- Аттенюаторы(4852)
Соответствующий производитель






-
Оптоэлектроника
Оптоэлектроника
- Оптомеханический(480)
- Осветительная арматура(125)
- Лазерные диоды, лазерные модули - лазерная доставка, лазерные волокна(345)
- Hene Laser Systems(31)
- Hene Laser Heads(27)
- Отображать подсветки(93)
- Ксенон освещение(387)
- Сенсорный экран оверлеи(453)
- Индикаторы панели, индикаторы(75729)
- Оптика - источник света дистанционного фосфора(269)
- Оптика - отражатели(665)
- Оптика - свет трубы(5384)
- Оптика - линзы(4951)
- Светодиоды - распорки, дистанционные втулки(2718)
- Светодиоды - лампа замены(29718)
- Светодиоды - Индикаторы настенных плат, массивы, стержни, гистограммы(9083)
- Thermal светодиодные продукты(667)
- Светодиодные осветительные комплекты(64)
- Светодиодное освещение - белый(37580)
- Светодиодное освещение - цвет(4728)
- Светодиодное освещение - початки, двигатели, модули, полосы(28735)
- Светодиодная индикация - дискретные(27601)
- Лазерные диоды, модули(1553)
- Неоновые лампы - ламп накаливания,(311004)
- Лампы - холодный флуоресцентный (CCFL) & amp;Укр(164)
- Инверторы(7728)
- ИК, УФ, видимой излучателей(3871)
- Оптоволоконная оптика - передатчики - интегрированная схема привода(4085)
- Волоконная оптика - приемник - дискретные(350)
- Волоконная оптика - трансивер модулей(18758)
- Оптоволоконная оптика - переключатели, мультиплексоры, демольтиплекторы(1387)
- Волоконная оптика - приемники(695)
- Волоконная оптика - аттенюаторы(654)
- Электролюминесцентные(102)
- Дисплей, монитор - контроллер интерфейса(98)
- Дисплей модулей - вакуумный флуоресцентный (VFD)(249)
- Модули отображения - светодиодная точка -матрица и кластер(865)
- Дисплей модулей - светодиодный символ и числовой(5421)
- Отображение модулей - LCD, OLED, графика(4654)
- Дисплей -модули - ЖК -дисплей, OLED и цифровой(2202)
- Отображение панели, линзы(88)
- Адресный, специальность(458)
Соответствующий производитель







-
Датчики, преобразователи
Датчики, преобразователи
- Ультразвуковые приемники, передатчики - промышленные(115)
- Датчики температуры - термостаты - механические - промышленные(3103)
- Датчики температуры - аналоговый и цифровой выход - промышленность(209)
- Датчики близости - промышленные(13611)
- Датчики давления, преобразователи - промышленные(26503)
- Оптические датчики - фотоника - счетчики, детекторы, SPCM (модуль счета с одним фотоном)(751)
- Оптические датчики - модули камеры(875)
- Магнитные датчики - положение, близость, скорость (модули) - промышленные(554)
- Силовые датчики - промышленные(346)
- Датчики потока - промышленные(151)
- Плавание, датчики уровня - промышленные(310)
- Энкодеры - промышленные(4980)
- Датчики цвета - промышленные(50)
- Сенсорные датчики(100)
- Ультразвуковой приемники, передатчики(2421)
- Температуры - термостаты - датчики твердого(1096)
- Температурный датчик - Термостаты - Механические(3397)
- Датчики температуры - термопары, температурные зонды(1921)
- Датчики температуры - RTD (детектор температуры сопротивления)(1525)
- Датчики температуры - термисторы PTC(2273)
- Датчики температуры - термисторы NTC(13259)
- Датчики температуры - аналоговый и цифровой выход(3928)
- Тензодатчики(1399)
- Специализированные датчики(1861)
- Солнечные батареи(503)
- Датчики удара(84)
- Датчик интерфейс - Джанкшен блоков(2519)
- Кабель датчика - сборки(22011)
- Близость/размещение датчиков - готовых блоков(725)
- Бесконтактные датчики(2860)
- Датчики давления, преобразователи(11317)
- Датчики - угол, линейная позиция измерения(6022)
- Оптические датчики - отражающие - логический выход(194)
- Оптические датчики - отражающие - аналоговый выход(432)
- Датчики фотооптические - фототранзисторы(1027)
- Оптические датчики - фотоинтерпрупторы - тип слота - выход транзистора(1427)
- Оптические датчики - Фотоинтерпруперы - Тип слота - логический выход(1215)
- Оптические датчики - фотоэлектрические, промышленные(16763)
- Датчики фотооптические - фотодиоды(1543)
- Оптические датчики - фото детекторы - приемник(2605)
- Оптические датчики - детекторы фото - логический выход(146)
- Оптические датчики - фото детекторы - CdS клетки(74)
- Датчики фотооптические - для измерения расстояния(377)
- Оптические датчики - окружающий свет, IR, ультрафиолетовые датчики(1305)
- Категории Многофункциональные(558)
- Датчики движения - вибрация(337)
- Датчики движения - наклона выключатели(67)
- Датчики движения - оптический(719)
- Датчики движения - Инклинометры(175)
- Датчики движения - IMUS (инерционные измерительные единицы)(416)
- Датчики движения - волчки(214)
- Датчики движения - акселерометры(1911)
- Магниты - датчик соответствует(119)
- Магниты - многоцелевой(1965)
- Магнитные датчики - переключатели (твердого)(3700)
- Магнитные датчики - положение, близость, скорость (модули)(5199)
- Магнитные датчики - линейные, компас (ICs)(1247)
- Магнитные датчики - компас, магнитное поле (модули)(35)
- Преобразователи LVDT (линейная переменная дифференциальная трансформатор)(204)
- Модулей ИК-приемопередатчика(196)
- Датчики изображения, камеры(2235)
- Влажность, датчики влажности(1425)
- Датчики газа(1217)
- Датчики силы(188)
- Датчики расхода(550)
- Поплавок, датчики уровня(1343)
- Энкодеры(6357)
- Датчики пыли(43)
- Текущий преобразователи(3455)
- Цвет датчиков(85)
- Усилители(1905)
Соответствующий производитель







-
Разъемы соединений
Разъемы соединений
- USB, DVI, HDMI -разъемы(446)
- Соединения с твердым состоянием(555)
- Розетки для ICS, транзисторы(953)
- Подключаемые разъемы(1221)
- Фотоэлектрические (солнечные панели) разъемы(136)
- Волоконно -оптические разъемы(370)
- FFC, FPC (плоская гибкая) разъемы(761)
- D-Sub, D-образные разъемы(2887)
- Коаксиальные разъемы (RF)(2389)
- Круглые разъемы(14162)
- Разъемы питания типа лезвия(273)
- Пробки и сосуды(2597)
- Разъемы USB, DVI, HDMI - адаптеры(572)
- USB, DVI, HDMI -разъемы(4298)
- Терминалы - провод к разъемам на плате(217)
- Терминалы - Соединители соединитель проводов(4322)
- Терминалы - провода контактные разъемы(328)
- Терминалы - башни разъемы(1273)
- Терминалы - специализированные разъемы(2042)
- Терминалы - лопата разъемы(3902)
- Терминалы - припоя наконечник разъемы(345)
- Терминалы - винт разъемы(745)
- Терминалы - кольцо разъемы(12596)
- Терминалы - прямоугольные соединители(4747)
- Терминалы - быстрое подключение, быстрое отключение разъемов(8514)
- Терминалы - PC Pin, один пост разъемы(3776)
- Терминалы - контактный PC сосудов, разъем разъемы(5883)
- Терминалы - магнитной проволокой разъемы(1653)
- Терминалы - нож разъемы(112)
- Терминалы - корпуса, сапоги(2850)
- Терминалы - фольга разъемы(108)
- Терминалы - ствол, пуля разъемы(1107)
- Терминалы - адаптеры(137)
- Клеммные колодки и башни доски(1159)
- Терминал Junction систем(2533)
- Терминальные блоки - провод к плате(43615)
- Терминальные блоки - специализированные(3722)
- Терминальные блоки - распределения питания(847)
- Терминальные блоки - крепление панели(1359)
- Клеммы - интерфейсные модули(1819)
- Клеммы - заголовки, вилки и розетки(119920)
- Терминальные блоки - Din-рейку, канал(9373)
- Терминальные блоки - контакты(65)
- Терминал блоки - блоки барьера(47517)
- Терминальные блоки - адаптеры(1059)
- Твердотельные освещения соединители - контакты(271)
- Соединения с твердым состоянием(1344)
- Розетки для микросхемы, транзисторы - адаптеры(275)
- Розетки для ICS, транзисторы(22148)
- Шунтов, перемычки(907)
- Прямоугольные соединители - подпружиненный(7721)
- Прямоугольные соединители - корпуса(43023)
- Прямоугольные разъемы - заголовки, специальный штифт(6129)
- Прямоугольные разъемы - заголовки, сосуды, женские розетки(229601)
- Прямоугольные разъемы - заголовки, мужские булавки(543338)
- Прямоугольные разъемы - бесплатное подвес, панель(30142)
- Прямоугольные соединители - контакты(10681)
- Прямоугольные разъемы - плата, прямая проволока на плату(2432)
- Прямоугольные соединители - Адаптеры(475)
- Прямоугольная - плата на борт разъемы - заголовки, сочетки, женские розеты(9)
- Прямоугольная - плата на борт разъемы - заголовки, мужские булавки(2)
- Прямоугольные разъемы - проставки платы, укладчики (плата на плату)(238901)
- Прямоугольные разъемы - массивы, тип края, мезонин (доска к доске)(37853)
- Запись Соединители - отверстия, розеток, модули(10310)
- Подключаемые разъемы(6049)
- Фотоэлектрические (солнечные панели) разъемы - контакты(77)
- Фотоэлектрические (солнечные панели) разъемы(504)
- Модульные разъемы - электрические блоки(99)
- Модульные соединители - Разъемы(1674)
- Модульные разъемы - Plug корпуса(181)
- Модульные соединители - Разъемы с магнетизм(10152)
- Модульные соединители - Разъемы(23416)
- Модульные разъемы - адаптеры(855)
- Памяти разъемы - PC карты - адаптеры(21)
- Разъемы памяти - гнезда плат PC Card(3299)
- Разъемы памяти - Inline модулей(3390)
- LGH разъемы(764)
- Трапеция - вставки(2758)
- Трапеция - лицевые панели, рамки(1926)
- Сверхмощный соединители - вставки, модули(4190)
- Сверхмощный соединители - корпуса, вытяжки, баз(17226)
- Сверхмощный соединители - кадры(523)
- Сверхмощный соединители - контакты(1832)
- Сверхмощный соединители - сборки(671)
- Волоконно оптические соединители - корпуса(919)
- Волоконно-оптические соединители - Адаптеры(4455)
- Волоконно оптические разъемы(3001)
- FFC, FPC (плоский гибкий) соединители - корпуса(652)
- FFC, FPC (плоский гибкий) соединители - контакты(202)
- FFC, FPC (плоская гибкая) разъемы(18691)
- Соединители D-Sub, D-образный - терминаторы(47)
- Соединители D-Sub, D-образный - корпуса(12238)
- Соединители D-Sub, D-образный - контакты(2714)
- D-Sub, D-образные разъемы-Бэки, капюшоны(5995)
- Соединители D-Sub, D-образный - адаптеры(1304)
- Соединители D-Sub(141346)
- D-образный соединители - Centronics(8770)
- Контакты, пружиной и давления(630)
- Контакты - многоцелевой(6196)
- Контакты - Leadframe(122)
- Коаксиальные соединители (РФ) - терминаторы(1231)
- Коаксиальные соединители (РФ) - контакты(480)
- Коаксиальные соединители (РФ) - Адаптеры(6386)
- Коаксиальные разъемы (RF)(25734)
- Круглые соединители - корпуса(441226)
- Круглые соединители - контакты(4737)
- Круглые разъемы - бэк -оболочки и кабельные зажимы(53692)
- Круглые соединители - Адаптеры(8839)
- Круглые разъемы(1196254)
- Торцевые разъёмы карты - корпуса(469)
- Торцевые разъёмы карты - Edgeboard разъемы(672683)
- Торцевые разъёмы карты - контакты(325)
- Торцевые разъёмы карты - адаптеры(73)
- Разъемы питания лезвия тип - корпуса(837)
- Разъемы питания лезвия тип - контакты(393)
- Разъемы питания типа лезвия(4163)
- Между адаптеры серии(649)
- Ствол - разъемы питания(935)
- Ствол - аудио разъемы(2432)
- Ствол - аудио адаптеры(92)
- Банан и кончик соединители - Разъемы, вилки(1644)
- Банан и кончик соединители - Привязка постов(239)
- Банан и кончик соединители - Адаптеры(75)
- Разъемы Backplane - специализированные(45586)
- Разъемы объединительной платы - корпуса(6863)
- Разъемы Backplane - жесткая метрика, стандартная(6297)
- Разъемы объединительной платы - DIN 41612(9408)
- Разъемы объединительной платы - контакты(3583)
- Разъемы объединительной платы - АРИНДЖ вставок(2357)
- Разъемы объединительной платы - АРИНДЖ(3789)
Соответствующий производитель







-
Резисторы
-
Конденсаторы
Конденсаторы
- Алюминиевые электролитические конденсаторы(16817)
- Триммеры, переменных конденсаторов(3151)
- Тонкие пленочные конденсаторы(3473)
- Танталовые конденсаторы(136103)
- Тантал - полимерные конденсаторы(9778)
- Кремния конденсаторы(320)
- Оксид ниобия конденсаторы(330)
- Слюда и PTFE конденсаторы(9101)
- Пленочные конденсаторы(150406)
- Электрические двойные конденсаторы (EDLC), суперконденсаторы(2782)
- Керамические конденсаторы(833829)
- Конденсатор сетей, массивы(2383)
- Алюминиевые электролитические конденсаторы(125325)
- Алюминий - полимерные конденсаторы(7544)
Соответствующий производитель






-
Трансформаторы
Трансформаторы
Соответствующий производитель







-
Изоляторы
-
Кристаллы, осцилляторы, резонаторы
Кристаллы, осцилляторы, резонаторы
Соответствующий производитель






-
Переключатели
Переключатели
- Переключатели блокировки(2893)
- Аварийные остановки (E-Stop) переключатели(1160)
- Кабельные выталкивающие переключатели(571)
- Переключатели рычажные(33608)
- Барабанные переключатели(742)
- Тактильные переключатели(14263)
- Привязка действий, концевые выключатели(28077)
- Переключатели ползунковые(5166)
- Переключатели(9720)
- Поворотные переключатели(13850)
- Переключатели типа rocker(53790)
- Кнопочные переключатели - эффект Холла(127)
- Кнопочные переключатели(190826)
- Программируемый дисплей переключается(39)
- Навигация переключатели, джойстик(1882)
- Магнитные, Герконовые переключатели(1399)
- Переключение клавиатуры(637)
- Блокировка клавиатуры переключатели(3684)
- DIP-переключатели(7747)
- Компоненты настраиваемых переключатель - объектив(1435)
- Настраиваемые компоненты коммутатора - источник освещения(1236)
- Конфигурируемые компоненты коммутатора - блок контакта(1401)
- Компоненты настраиваемых переключатель - тела(16077)
- Отключить выключатель компоненты(2567)
Соответствующий производитель






-
Реле
Реле
- Безопасные реле(1310)
- Герконовые реле(1735)
- Высокочастотные (RF) реле(1190)
- Контакторы (твердотельное)(686)
- Контакторы (электромеханические)(11952)
- Автомобильные реле(1881)
- Твердотельные реле(10652)
- Сигнальное реле, до 2 ампер(9149)
- Розетки для реле(2075)
- Питания реле, над 2 усилителей(31604)
- Модули реле ввода / вывода(712)
- Модули ввода-вывода реле - вход(2)
- Модуль ввода/вывода ножках(247)
Соответствующий производитель
















Выберите язык
Текущий язык
русский
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Как управлять двигателями постоянного тока с помощью интегральной схемы драйвера мотора L293D
Время: 2026/06/9
Просматривать: 174
Управление двигателем с помощью микроконтроллера не так просто, как прямое подключение его к выходному контакту. Большинство микроконтроллеров не могут обеспечить достаточный ток для безопасного привода моторов, и попытка сделать это может повредить цепь. L293D — одна из самых широко используемых интегральных схем драйверов моторов в таких ситуациях. В этой статье вы узнаете, что такое L293D, как он работает внутри, его основные характеристики, функции контактов, процесс взаимодействия с Arduino и многое другое.
Каталог
Двойной H-мост L293D
L293D — это интегральная схема драйвера мотора с двойным H-мостом, разработанная для того, чтобы позволить микроконтроллерам с низким потреблением и логическим схемам управлять нагрузками с высоким током. Она служит интерфейсом между управляющей схемой и нагрузкой, обеспечивая надежное переключение и снижая риск повреждения чувствительных логических компонентов. Устройство поддерживает стандартные уровни логики DTL и TTL, что делает его совместимым со многими популярными микроконтроллерами и встроенными системами.
ИС содержит четыре канала драйвера, которые могут быть сконфигурированы как два H-моста, что позволяет независимо управлять двумя двигателями постоянного тока или одним биполярным шаговым двигателем. Она поддерживает напряжение питания мотора до 36 В, номинальный выходной ток до 600 мА на канал и частоту переключения до 5 кГц. L293D доступна в компактном корпусе на 16 контактов и по-прежнему является популярным выбором для управления моторами, прототипирования и образовательных проектов.
Основные характеристики и спецификации
| Категория |
Параметр |
Спецификация |
| Общие |
Тип устройства |
Четырехканальный полумост / двойной H-мост двигателя IC |
| Совместимость с логикой |
Совместимость с DTL и TTL |
|
| Количество каналов |
4 канала драйвера |
|
| Количество H-мостов |
2 |
|
| Максимальная частота переключения |
5 кГц |
|
| Особенности |
Управление включением |
Да |
| Защита от перегрева |
Да |
|
| Внутренние диммерные диоды |
Да |
|
| Высокая шумозащита |
Напряжение входного сигнала "0" до 1.5 В |
|
| Электрические |
Напряжение питания мотора (Vs) |
36 В Макс |
| Напряжение питания логики (Vss) |
36 В Макс |
|
| Входное напряжение (Vi) |
7 В Макс |
|
| Напряжение включения (Ven) |
7 В Макс |
|
| Номинальный выходной ток |
600 мА на канал |
|
| Пиковый выходной ток (100 мкс неповторяющийся) |
1.2 А на канал |
|
| Общая мощность рассеивания (Ptot) |
4 Вт |
|
| Тепловая |
Температура хранения (Tstg) |
-40°C до +150°C |
| Температура соединения (Tj) |
-40°C до +150°C |
|
| Упаковка |
Корпус с выводами |
PowerDIP-16 (L293D) |
| Корпус для поверхностного монтажа |
SO-20 (L293DD) |
|
| Количество выводов |
16 выводов (PowerDIP) |
|
| Рассеивание тепла |
Центральные выводы соединены для отвода тепла |
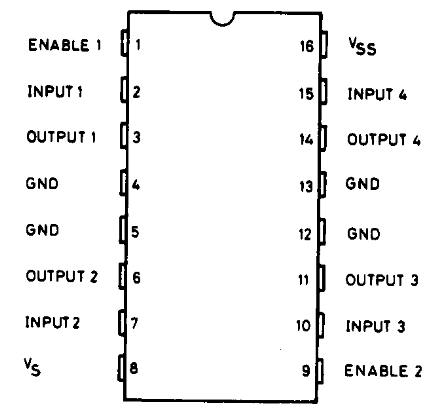
Детали и функции распиновки L293D
| Номер вывода |
Название вывода |
Тип |
Функция |
| 1 |
Enable 1 (EN1) |
Вход |
Включает драйвер 1 и драйвер 2. Должен быть HIGH, чтобы выходы 1 и 2 работали. Может использоваться для управления скоростью PWM. |
| 2 |
Вход 1 (IN1) |
Вход |
Логический управляющий вход для выхода 1. Определяет направление мотора при использовании с входом 2. |
| 3 |
Выход 1 (OUT1) |
Выход |
Выход драйвера, подключенный к одному из выводов мотора или нагрузки. |
| 4 |
GND |
Питание |
Соединение с землёй для устройства. |
| 5 |
GND |
Питание |
Соединение с землёй для устройства. |
| 6 |
Выход 2 (OUT2) |
Выход |
Выход драйвера, подключенный к другому выводу мотора или нагрузки. |
| 7 |
Вход 2 (IN2) |
Вход |
Логический управляющий вход для выхода 2. Работает с входом 1 для управления направлением. |
| 8 |
Vs |
Питание |
Входное напряжение питания мотора. Поддерживает напряжение моторов до 36 В. |
| 9 |
Enable 2 (EN2) |
Вход |
Включает драйвер 3 и драйвер 4. Должен быть HIGH, чтобы выходы 3 и 4 работали. Может использоваться для управления скоростью PWM. |
| 10 |
Вход 3 (IN3) |
Вход |
Логический управляющий вход для выхода 3. Определяет направление мотора при использовании с входом 4. |
| 11 |
Выход 3 (OUT3) |
Выход |
Выход драйвера, подключенный к одному из выводов второго мотора или нагрузки. |
| 12 |
GND |
Питание |
Соединение с землёй для устройства. |
| 13 |
GND |
Питание |
Соединение с землёй для устройства. |
| 14 |
Выход 4 (OUT4) |
Выход |
Выход драйвера, подключенный к другому выводу второго мотора или нагрузки. |
| 15 |
Вход 4 (IN4) |
Вход |
Логический управляющий вход для выхода 4. Работает с входом 3 для управления направлением. |
| 16 |
Vss |
Питание |
Входное напряжение питания логики (обычно 5 В) для внутренних управляющих схем. |
Функциональная блок-схема L293D
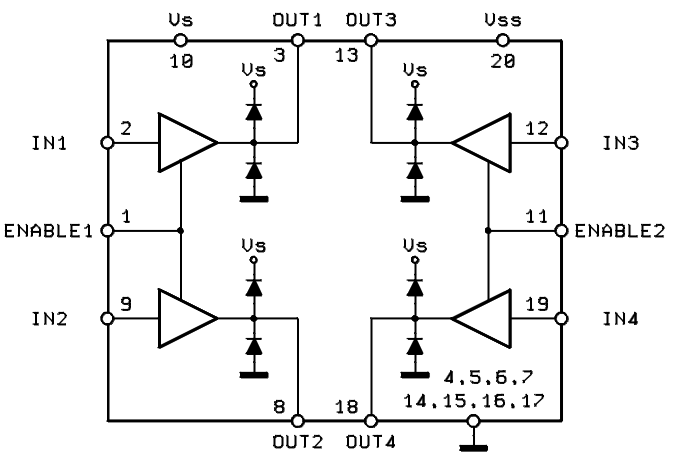
Функциональная блок-схема показывает, как управляющие сигналы проходят через L293D для управления подключенной нагрузкой. Когда логический сигнал подается на один из входных выводов, он поступает во внутреннюю управляющую схемотехнику, которая обрабатывает сигнал и определяет состояние соответствующего выходного драйвера. Выходная стадия затем использует напряжение питания мотора для подачи необходимого тока на нагрузку, подключенную к выходным выводам.
Диаграмма также иллюстрирует, как каждая пара входов и выходов образует драйвер H-моста. Изменяя логические состояния входов, ток может течь через нагрузку в разных направлениях, позволяя осуществлять вращение мотора вперед и назад. Выводы Enable действуют как управляющие шлюзы для каждого секции H-моста и могут использоваться для включения или отключения выходов или применения сигналов PWM для управления скоростью. Этот поток сигналов от входа к выходу позволяет L293D осуществлять контролируемое двустороннее переключение для приложений управления моторами.
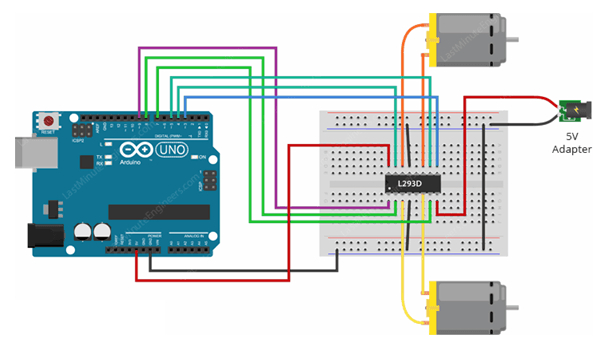
Процесс интерфейса L293D с Arduino
Основная схема подключения показывает Arduino Uno, подключенный к микросхеме драйвера моторов L293D, которая используется для управления двумя DC моторами. Arduino предоставляет логические управляющие сигналы, в то время как отдельный источник питания на 5 В обеспечивает ток, необходимый моторам. L293D действует как интерфейс между низковольтными выводами Arduino и более высокими токами моторной нагрузки. Входные выводы на L293D получают управляющие сигналы от Arduino, в то время как выходные выводы подключаются непосредственно к моторам. И Arduino, и внешний источник питания должны иметь общий провод заземления для обеспечения правильной работы.
Скорость мотора можно контролировать с помощью широтно-импульсной модуляции (ШИМ). В этом методе Arduino отправляет сигнал ШИМ на один из выводов Enable L293D. Изменяя скважность ШИМ, среднее напряжение, подаваемое на мотор, меняется, позволяя плавно регулировать скорость без изменения напряжения питания.
Направление мотора контролируется через входные выводы. Например, установка IN1 на HIGH и IN2 на LOW заставляет мотор вращаться в одном направлении, в то время как изменение логических уровней заставляет мотор вращаться в противоположном направлении. Применение одного и того же логического уровня к обоим входам может остановить или тормозить мотор в зависимости от конфигурации схемы.
Одна из самых распространённых ошибок программирования — это забывание настроить вывод enable как выход или оставление его на уровне LOW, что предотвращает работу мотора. Неправильные назначения пинов в коде также могут вызывать неожиданные поведенческие эффекты мотора. Ещё одной частой проблемой является несоответствие общего заземления между Arduino и источником питания мотора, что приводит к нестабильной работе или отсутствию реакции мотора вообще.
L293D против других ИС драйвера мотора
| Спецификация |
L293D |
L298N |
TB6612FNG |
DRV8833 |
BTS7960 |
| Тип драйвера |
Двойной H-мост |
Двойной H-мост |
Двойной H-мост |
Двойной H-мост |
Полный H-мост |
| Напряжение питания мотора |
4.5 В до 36 В |
5 В до 46 В |
4.5 В до 13.5 В |
2.7 В до 10.8 В |
5.5 В до 27 В |
| Логическое напряжение |
4.5 В до 7 В |
5 В |
2.7 В до 5.5 В |
2 В до 7 В |
3.3 В до 5 В |
| Непрерывный выходной ток |
600 мА/канал |
2 А/канал |
1.2 А/канал |
1.5 А/канал |
43 А |
| Пиковый выходной ток |
1.2 А/канал |
3 А/канал |
3.2 А/канал |
2 А/канал |
55 А |
| Внутренние защитные диоды |
Да |
Нет |
Да |
Да |
Да |
| Тепловая защита |
Да |
Да |
Да |
Да |
Да |
| Поддержка ШИМ |
Да |
Да |
Да |
Да |
Да |
| Выходная технология |
Биполярные транзисторы |
Биполярные транзисторы |
MOSFET |
MOSFET |
MOSFET |
| Эффективность |
Низкая |
Низкая |
Высокая |
Высокая |
Очень высокая |
| Потеря напряжения |
Высокая (≈1.2–1.8 В на стороне) |
Высокая (≈2–4 В всего) |
Низкая (<0.5 V typical) |
Низкая (<0.4 V typical) |
Очень низкая |
| Генерация тепла |
Высокая |
Высокая |
Низкая |
Низкая |
Низкая |
| Требуется внешний радиатор |
Обычно не требуется |
Часто требуется |
Редко требуется |
Редко требуется |
Требуется при высоком токе |
| Количество DC моторов |
2 |
2 |
2 |
2 |
1 высокомощный мотор |
| Лучше всего для |
Малые DC моторы, образовательные проекты |
Моторы средней мощности |
Роботы, батарейные устройства |
Компактные портативные конструкции |
Высокомощные моторы и робототехника |
Типичные приложения и сценарии использования
Образовательные проекты и проекты на основе Arduino
L293D широко используется в образовательных проектах и на образовательных платформах на базе Arduino. Его простой интерфейс позволяет новичкам управлять DC моторами и изучать основные концепции, такие как управление направлением мотора, управление скоростью ШИМ и работа H-моста без необходимости в сложных схемах.
Малые мобильные роботы
Многие небольшие роботизированные устройства используют L293D для независимого управления двумя DC моторами. Это позволяет роботу двигаться вперед, назад, поворачивать влево и вправо, управляя направлением и скоростью каждого мотора отдельно.
Управление шаговым двигателем
Двойная архитектура H-моста L293D может использоваться для управления биполярными шаговыми моторами. Энергизируя катушки мотора в определенной последовательности, драйвер позволяет выполнять точные пошаговые движения для приложений позиционирования.
Управление реле и соленоидами
L293D может управлять реле и соленоидами, которые требуют большего тока, чем может предоставить выходной пин микроконтроллера. Его встроенные защитные диоды помогают подавлять импульсы напряжения, возникающие при переключении этих индуктивных нагрузок.
Автоматизированные системы управления
В простых системах автоматизации L293D используется для управления маленькими актуаторами, клапанами и механическими устройствами. Драйвер предоставляет простой способ интерфейса логических схем с электромеханическими нагрузками.
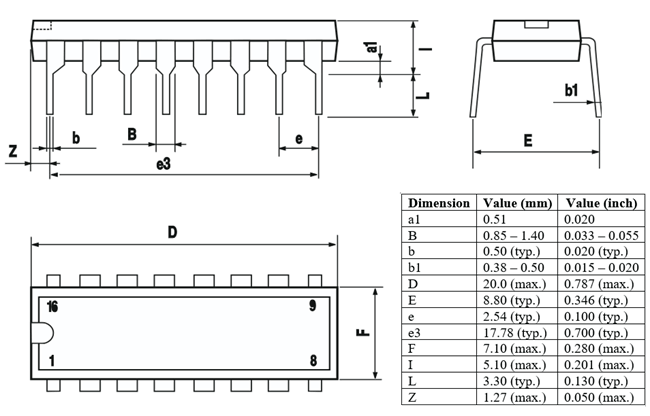
Механические размеры
Производитель
STMicroelectronics является одним из ведущих производителей полупроводников в мире, с многолетним опытом разработки и производства аналоговых, силовых, моторных и смешанных интегральных схем. Для таких продуктов, как интегральная схема драйвера мотора L293D, STMicroelectronics использует зрелые процессы производства полупроводников, чтобы обеспечить стабильную электрическую работу, надежность, термальную стабильность и долгосрочную доступность продукта. Его производственные способности поддерживаются обширными ресурсами исследований и разработок, автоматизированными производственными системами и соблюдением международных стандартов качества и охраны окружающей среды.
Часто задаваемые вопросы [FAQ]
1. Почему у L293D есть отдельные выводы питания для логики и мотора?
L293D использует отдельные источники питания, чтобы логическая схема и схема мотора могли работать при разных напряжениях. Это позволяет низковольтному микроконтроллеру управлять более высоковольтным мотором, не подвергая управляющую схемотехнику напряжению питания мотора.
2. Как L293D защищается от скачков напряжения, создаваемых моторами?
L293D включает внутренние диоды-клампы, которые поглощают обратное напряжение, возникающее при отключении индуктивной нагрузки. Эти диоды помогают предотвратить повреждение драйвера и улучшают общую надежность схемы.
3. Почему мотор, управляемый L293D, часто работает медленнее, чем ожидается?
L293D использует выходные каскады на биполярных транзисторах, которые создают падение напряжения между источником питания и мотором. В результате мотор получает меньше напряжения, чем предоставляет источник питания, что может снижать скорость и момент.
4. Может ли L293D независимо управлять двумя моторами на разных скоростях?
Да. Каждая секция H-моста может управляться отдельно. Нанесением различных сигналов ШИМ на выводы включения каждый мотор может работать на своей скорости и направлении.
5. Что произойдет, если вывод включения оставить неподключенным?
Соответствующие выходы могут оставаться отключенными или работать непредсказуемо. Вывод включения должен быть подключен к определенному HIGH или ШИМ сигналу, чтобы обеспечить правильное управление мотором.
6. Почему требуется общий провод между Arduino и источником питания L293D?
Общий провод обеспечивает общий напряженческий опор, между управляющей схемой и драйвером мотора. Без него логические сигналы могут не интерпретироваться правильно, что приводит к ненадежной работе.
7. Когда следует выбрать современный драйвер мотора вместо L293D?
Для устройств с батарейным питанием, моторов с высоким током или приложений, требующих максимальной эффективности, современные драйверы на основе MOSFET, такие как TB6612FNG или DRV8833, часто являются лучшими выборами, поскольку они выделяют меньше тепла и расходуют меньше энергии.
Связанная статья
-
![Пошаговый процесс производства интегральных схем]() Jun 09 2026
Jun 09 2026 -
![Входное и выходное сопротивление в операционных усилителях]() Jun 09 2026
Jun 09 2026
Связанные продукты

GRM21BR61A226ME51L
CAP CER 22UF 10V X5R 0805

CS0603KRX7R9BB102
CAP CER 1000PF 50V X7R 0603
12102C392KAT2A
CAP CER 3900PF 200V X7R 1210

TLC556CDRG4
IC OSC TIMER DUAL 2.1MHZ 14-SOIC
XC6SLX45-3FG484I
IC FPGA 316 I/O 484FBGA

ADG1436YRUZ
IC SWITCH SPDTX2 1.8OHM 16TSSOP

TUSB7340IRKMT
IC HUB CONTROLLER USB 100WQFN

TM4C1230C3PMIR
IC MCU 32BIT 32KB FLASH 64LQFP

HIP4081AIBZ
IC HALF/FULL BRIDGE DRVR 20SOIC

GS70328TS-12
GS70328TS-12 GSI
CS16312EN
CS16312EN SEMIC

R7F0C004M2DFB-C
RENESAS LQFP80

DS1245AB-120IND
IC NVSRAM 1MBIT PARALLEL 32EDIP